ftrace
汽车
英语
dither
注解处理器
emmc
Arduino基础与进阶
WinLicense
逆向
模板
redis安装
web课程与设计
rpa
几何
零售
Cookie
免杀
翻译
二线船闸
华为面试
轨迹规划
2024/4/11 21:44:52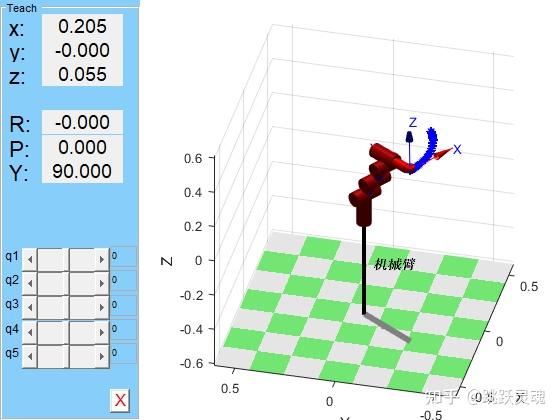
article-六轴机械臂(带抓手)运动学分析+轨迹规划
1正运动学分析
采用标准的D-h法进行机械腿模型分析: D-h表如下 (2)通过(1)求解出机器人各位姿变换矩阵后,求解机器人手臂变换矩阵
** **
。通过matlab 计算,写出机器人末端位置。
正运动学分…

曲线生成 | 基于多项式插值的轨迹规划(附ROS C++/Python/Matlab仿真)
目录 0 专栏介绍1 多项式插值2 多项式插值轨迹规划3 算法仿真3.1 ROS C++仿真3.2 Python仿真3.3 Matlab仿真0 专栏介绍
🔥附C++/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等);局部规划(DWA、APF等);曲线优化…
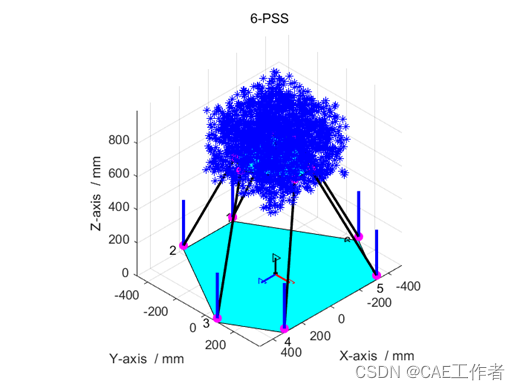
article-6-pss 并联六自由度机构轨迹规划
建模
** [外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-djltxj90-1687070335773)(data:image/svgxml;utf8, )]
**
程序如下: % clc % clear all % function []PSS1(XP,YP,ZP) tic %%%%%鍒濆浣嶇疆鐨勪綅濮?%%%%% % XP 0; %鍔ㄥ钩鍙…
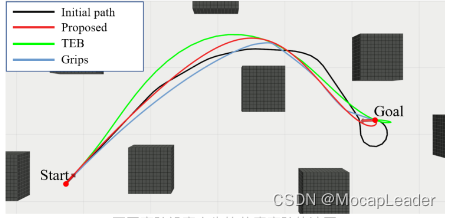
基于差速驱动移动基座的三维变型机器人轨迹优化
在执行任务时,服务机器人的功能结构变化可能会限制其自主导航能力,从而影响其行动力。本文的研究,旨在解决复杂三维环境中可变形机器人的轨迹规划问题,特别是应用最为广泛的基于差速驱动移动基座的移动机器人的轨迹规划。
这种全…

曲线生成 | 图解三次样条曲线生成原理(附ROS C++/Python/Matlab仿真)
目录 0 专栏介绍1 什么是样条?2 三次样条曲线原理2.1 曲线插值2.2 边界条件2.3 系数反解 3 算法仿真3.1 ROS C仿真3.2 Python仿真3.3 Matlab仿真 0 专栏介绍
🔥附C/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备!详细…
凸轮表(ECAM)的本质-运动控制轨迹规划(线性插值、3次样条插值、5次样条插值)
轨迹规划的重要性这里就不用多说,电子凸轮控制用到的凸轮表最终需要采用规划算法生成插值曲线,给到伺服的随动系统控制电子凸轮工作。通常运动控制器里对轨迹规划有5次样条插值和线性插值2种方法。
有关电子凸轮的详细内容,可以参看下面的博客,链接如下:
电子凸轮应用飞…

PonyAi Planning-横纵向轨迹规划
PonyAi Planning-横纵向轨迹规划
轨迹规划的探索和挑战
轨迹规划的概念安全舒适两不误:探讨优化算法在规划控制中的应用 轨迹规划的概念
决策
横向规划
纵向规划
优化算法在规划(Planning)中的应用 附赠自动驾驶学习资料和量产经验…
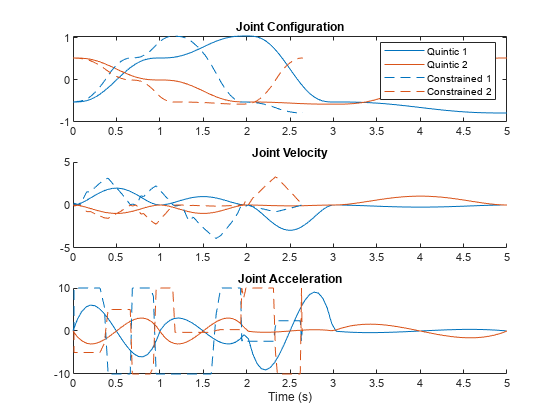
MATLAB - 使用 TOPP-RA 求解器生成带约束条件的时间最优轨迹
系列文章目录 前言
本例演示如何生成满足速度和加速度限制的轨迹。该示例使用了 contopptraj 函数,该函数使用可达性分析 (RA) 求解受约束的时间最优路径参数化 (TOPP) 轨迹。 一、示例背景
本例解决的是 TOPP 问题,这是一个机器人问题,其目…

曲线生成 | 图解B样条曲线生成原理(基本概念与节点生成算法)
目录 0 专栏介绍1 什么是B样条曲线?2 基函数的de Boor递推式3 B样条曲线基本概念图解4 节点生成公式 0 专栏介绍
🔥附C/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等)…

曲线生成 | 图解贝塞尔曲线生成原理(附ROS C++/Python/Matlab仿真)
目录 0 专栏介绍1 贝塞尔曲线的应用2 图解贝塞尔曲线3 贝塞尔曲线的性质4 算法仿真4.1 ROS C仿真4.2 Python仿真4.3 Matlab仿真 0 专栏介绍
🔥附C/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法…

(s,sdot)相图轨迹规划
看到知乎上一篇【轨迹规划】考虑动力学的轨迹规划问题
https://zhuanlan.zhihu.com/p/89718348
感觉有点意思。 假设你驾驶一辆小车想要尽快回家看一场比赛直播。你家离你有1km 远,回家的路是笔直的。如上图所示,这条路在第 0.3km 到 0.7km 间限速 10…
5次多项式轨迹规划(博途SCL源代码)
运动控制轨迹规划时,加速度不连续将会使电机抖动,产生机械冲击。凸轮表轨迹规划很多都是基于5次多项式轨迹规划。3次多项式轨迹规划请查看下面文章链接:
3次多项式轨迹规划(PLC SCL代码)_RXXW_Dor的博客-CSDN博客机器人、运动控制等常用的轨迹规划有三次多项式、五次多项式…
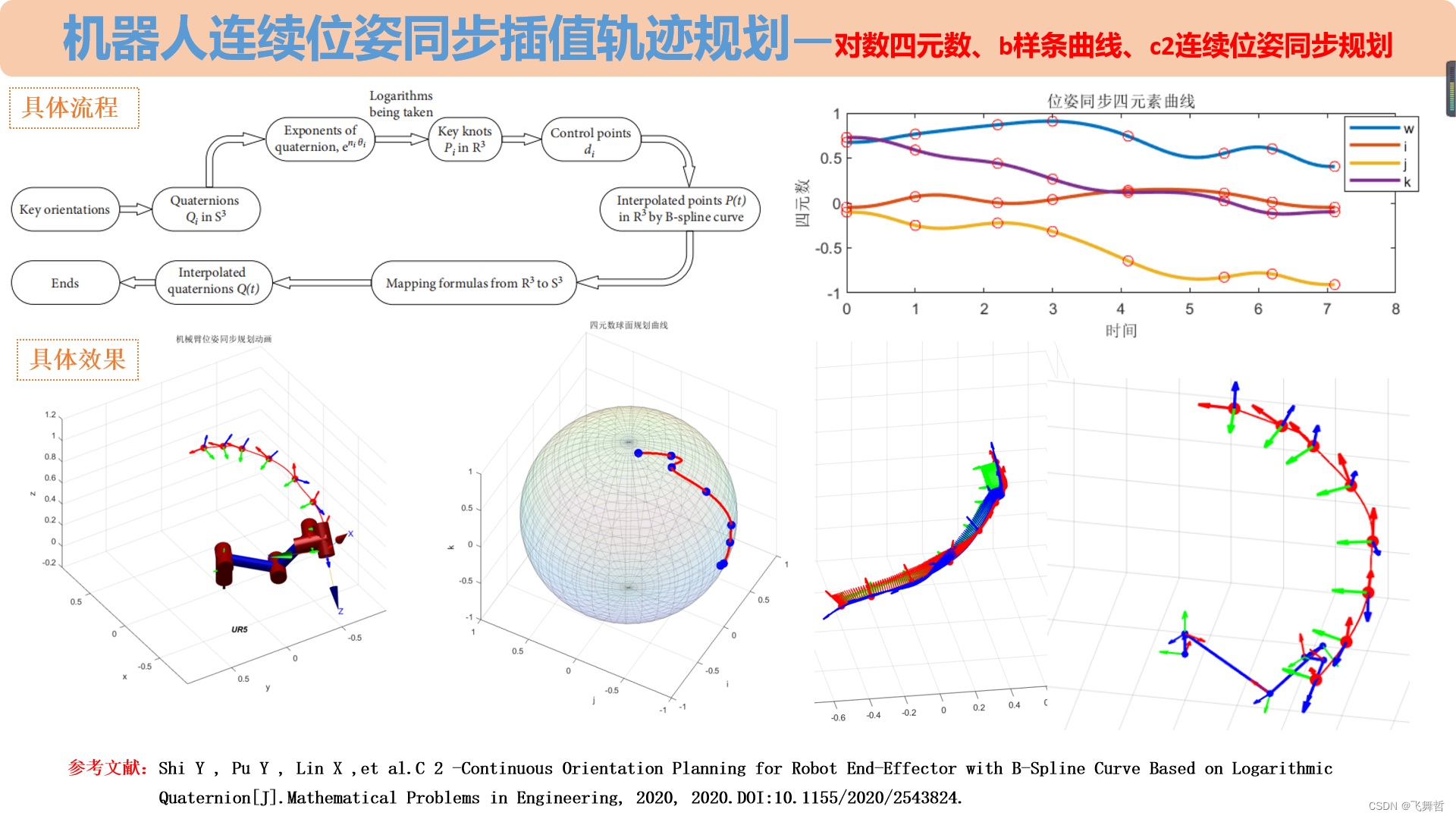
机器人连续位姿同步插值轨迹规划—对数四元数、b样条曲线、c2连续位姿同步规划
简介:Smooth orientation planning is benefificial for the working performance and service life of industrial robots, keeping robots from violent impacts and shocks caused by discontinuous orientation planning. Nevertheless, the popular used quate…